close
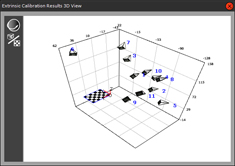
外部參數
Extrinsic Parameter

以3x4矩陣描述相機的位置(position)與擺設方向(orientation)。(上式還缺Translation)
主要是描述相對位置,通常是一個旋轉矩陣(Rotation Matrix)。
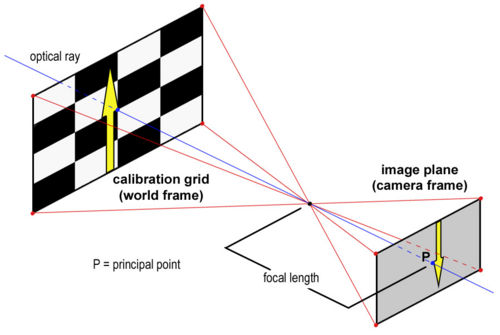
內部參數
Intrinsic Parameter

內部參數 以3x3矩陣描述光通過鏡頭投射到影像的座標位置。
主要是描述鏡頭和感光元件之間的關係。

搭配使用


藉由上式的相乘結果,便可以將現實世界的畫面,藉由相機,轉變成二維的照片。
Reference:
1. Wikipedia
2. http://www.cs.ucl.ac.uk/staff/Dan.Stoyanov/calib/
3. http://jde.gsyc.es/
4. http://hades.mech.northwestern.edu/
全站熱搜

 留言列表
留言列表